
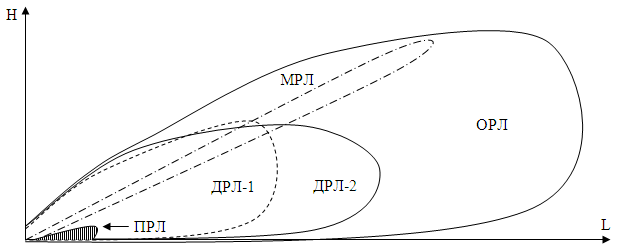
Рис.1 Дальность разных РЛС (Калытюк И.М.)
Использование радиолокационных станций к общим рекомендациям по визуальному и инструментальному методах наблюдения
Радиолокация значительно расширяет возможности человека в познании мира. С начала периода массового применения радиолокационных систем (РЛС) и до наших дней операторы сталкиваются с различными загадочными эффектами. Часть из них, связанная с несовершенством аппаратуры и природными явлениями, получила объяснение теоретически, и частично устраняются с помощью фильтров, более совершенной аппаратуры. РЛС, применяемые в аэропортах Гражданской Авиации: обзорные радиолокаторы аэродромные (ОРЛ), диспетчерские радиолокаторы (ДРЛ), пассивные радиолокаторы (ПРЛ) и метеорологические радиолокаторы (МРЛ), позволяют достаточно надежно фиксировать воздушные объекты в широком диапазоне дальностей, скоростей и высот. А это, в свою очередь, по ряду признаков аномальности – способствует выделению не отождествленных объектов, кроме того, и плазменных явлений (при некоторых условиях) – идеальный отражатель радиоволн.
Радиолокаторы, как правило, работают на принципе приема отраженной волны. Активные радиолокаторы в пассивном режиме работы фиксируют все предметы, отражающие волны: грозовые облака и скопления птиц. Но это позволяет и лучше знать воздушную обстановку. Точность радиолокаторов по дальности – не хуже 150м. Мерой времени в РЛС является 1мксек. За 1 мксек луч РЛС проходит 300м.
S = c · t = (3 · 108) · (10-6) = 3 · 102 = 300м (1)
По времени запаздывания отраженного сигнала определяется дальность:
Д = c · tзап / 2 = (3 · 108) · 10-6 / 2 = 150м (2)
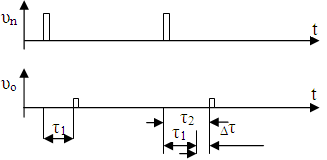
Рис.2 Оператор определяет изменение удаления цели от антенны радиолокационной станции по накоплению временных изменений отраженного сигнала на экране РЛС. (Калытюк И.М.)
Подобный эффект лежит в основе принципа Доплера, которая используется в режиме работы РЛС – СДЦ (СПЦ), то есть селекции движущихся целей (селекция подвижных целей). Данный режим используется для выделения целей на фоне пассивных помех. Однако у него есть и недостатки. Дальность работы РЛС в СДЦ составляет 60-75% от пассива. Существенным недостатком СДЦ является проявление «слепых скоростей». Это скорости полета, при которых летательный аппарат (ЛА) перемещается в пространстве за время посылки.
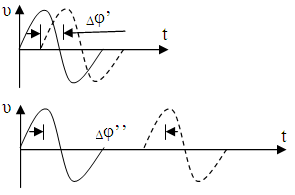
Рис.3 Фазовый сдвиг доплеровской частоты будет постоянным, когда ЛА перемещается за время между посылками импульсов, равное прохождению полуволны и кратное величине К. (Калытюк И.М.)
S = К · λ / 2, где К! = 1,2 … определит первую, вторую … пятую «слепые скорости». (3)
В общем случае – значение «слепые скорости» может быть определено из следующего соотношения
Wсл = 0,018 · К · λ · Fn , где 0,018 – постоянный коэффициент; (4)
К – коэффициент кратности = 1,2,3…;
Fn – количество импульсов в сек.
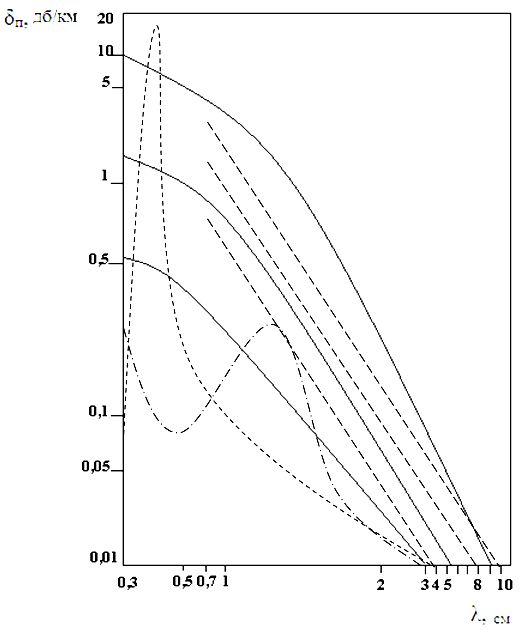
Рис.4 Диапазон наиболее выгодного применения РЛС (Калытюк И.М.)
Из графика следует, что разное возрастание затухания радиоволн наблюдается вблизи волны длины 0,25 и 0,5см для кислорода и 0,18-1,35см для водяного пара. Эти пики на графике объясняются резонансным поглощением энергии вблизи соответствующих частот. При малых размерах частиц (например, при тумане) происходит в основном поглощение энергии, при крупных частицах (дождь) – рассеяние. Ослабление энергии радиоволн при дожде и тумане показано кривыми 3-8.
Синхронность движения развертки электронного луча на экране РЛС с вращением антенны достигается совпадением механической и электрической частей через сельсин-датчики антенны и сельсин-приемники усилителя сигналов преобразующей аппаратуры. Точность механической части лучших РЛС – как отечественных, так и зарубежных – достигает 0,1º, а разрешающая способность – по ширине диаграммы направленности излучения антенны – 0,5º.
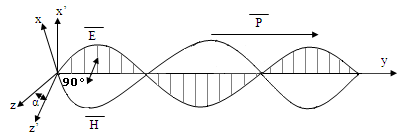
Рис.5 Электромагнитная сотставляющая и вектор Комова-Пойнтинга (Калытюк И.М.)
Е — электрическая составляющая;
Н — магнитная составляющая;
Р — вектор Комова-Пойнтинга – вектор распространения радиоволн
Дальность прямой видимости рассчитывается по формуле:
√ ((R3 + h)2 – R32 ) + √ ((R3 + h)2 – R32) , (5)
где R3 – радиус Земли – 6370км;
h – высота антенны;
Н – высота полета ЛА.
Поскольку 2R3>>h и 2R3>>Н, то приближено можно написать Дпв ≈ 113 (√h + √H) км (6)
Точность определения координат (КРЛ) гораздо выше, чем ДРЛ, ОРЛ.
Поскольку ослабление энергии радиоволн длиной более 10см весьма незначительно, оно для радиолокатора дециметрового и метрового диапазонов может не учитываться. Однако посадочные радиолокаторы, работающие в сантиметровом диапазоне, весьма подвержены атмосферным помехам. Это вынудило конструкторов, использовать у вибраторов ПРЛ устройства, изменяющие поляризацию радиоволн на линейную или круговую, что позволило выделять летательные аппараты (ЛА) на фоне интенсивных осадков в виде дождя или снега. Высотность современных РЛС достигает средних слоев атмосферы. Но не только большая высота полета улучшает обнаружение ЛА. Ощутимую роль играет и площадь отражения поверхности объекта, как и материал из которого изготовлен ЛА.
Табл.1 Площадь отражения поверхности объекта
|
Головная часть ракеты |
0,2 |
|
Человек |
0,8 |
|
Рубка подводной лодки |
1 |
|
Истребитель |
3-5 |
|
Фронтовой бомбардировщик |
7-10 |
|
Тяжелый бомбардировщик |
15-20 |
| Транспортный самолет |
50 |
В первых, несовершенных РЛС – когда система помех защиты была недостаточно отработана и в схемах не было эффективных фильтров – нередки были колебания сигналов, возраставшие порой лавинообразно: то ли от необычно сильного отраженного сигнала, то ли от колебания вторичных сигналов в радиосхеме.
Так называемые «кольца» (а) и ложные, симметричные реальной цели, метки (б) нередкое явление и на современных РЛС. Отраженный сигнал от морских волн, принимаемый антенной РЛС низко расположенной над водой, вполне согласуется с разработанной ныне теорией «волнового канала», когда луч РЛС может огибать поверхность на значительные расстояния в слое инверсии. Турбулентные вихри, стаи птиц (в), скопления насекомых, зоны электризации (г) – обнаруженные РЛС различного типа – никого уже не удивляют.
а
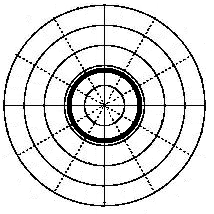
б’ б»
в

Рис.6 «Кольца», ложные цели и стаи птиц (Калытюк И.М.)
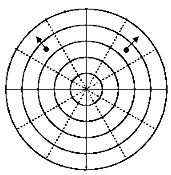
В последе время – когда сеть однотипных РЛС стала достаточно плотной и возникают зоны перекрытия – стали фиксироваться метки, возникающие от переизлучения встречных радиоволн, совпадающих по фазе и силе импульсов. Для выявления характера подобного сигнала достаточно изменить периодичность вращения антенны или отметить неподвижность метки (д), которая не будет видна на экране ПРВ. После изменения атмосферных условий этот редко фиксируемый эффект пропадет.
г, д
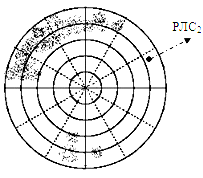
Рис.7 Зоны электризации и переизлучения (Калытюк И.М.)
В настоящее время различные типы РЛС, базирующиеся на территории крупных аэропортов страны, достаточно полно перекрывают воздушное пространство в своей зоне управления воздушным движением (УВД), а наличие оперативной связи между диспетчерскими пунктами Единой системы УВД (ДП ЕС УВД) позволяет оперативно информировать смежные ДП о наблюдаемых не отождествленных объектах и обмениваться необходимой информацией по слежению за ними, что в целом значительно повышает безопасность полетов.
Обычно наблюдаемые операторами РЛС воздушные объекты идентифицируются ими как аномальные при наличии следующих признаков аномальности:
-аномальная траектория движения, поворот под прямым углом или разворот не теряя скорости;
-резкие остановки и зависания;
-аномальные изменения высоты и скорости полета;
-аномальные помехи или электромагнитные эффекты;
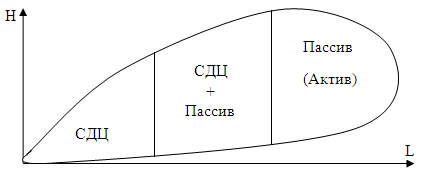
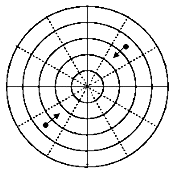
Рис.8 Использование СДЦ и режима Пассив (Калытюк И.М.)
Естественно, об идентификации объектов как аномальных можно говорить лишь при устойчивой работе РЛС. В отдельных случаях надежность радиолокационного обнаружения аномальных объектов подтверждается визуальными наблюдениями (причем, доклады экипажей Гражданской Авиации документируются аудиозаписью).
Целесообразно запросить у операторов ПРВ ПВО высоту объекта и степень контрастности метки на экране ПРВ. При работающем МРЛ – предложить оператору МРЛ обнаружить объект и сделать замер высоты, а также проследить некоторое время за объектом. Необходимо шире использовать фото-видео регистраторы: с целью последующего документирования наблюдения АО и их анализа. Поэтому полезно предложить Министерству Гражданской Авиации (МГА) оснастить видео-индикаторами ДРЛ.
При обнаружении аномальных объектов (АО) – как радиолокационном, так и визуальном – рекомендуется использовать весь радиолокационный комплекс, информируя о наблюдении диспетчеров всех диспетчерских пунктов Единой системы УВД – в секторе которых находится объект. При существующей системе радиолокационного контроля и управления воздушным движением в МГА вполне возможно (причем без особых затрат) организовать наблюдения за АО; это требует лишь ознакомления диспетчеров с методикой радиолокационных наблюдений АО. В целом, это будет способствовать повышению безопасности полетов и восстановлению искренности при встрече с нештатными ситуациями в полете, чем является для экипажа близкое наблюдение аномального объекта.
Список сокращений терминов:
АМ – амплитудная модуляция
АО – аномальный объект
ДП – диспетчерский пункт
ДРЛ – диспетчерский радиолокатор
КРЛ – координаты радиолокации
ЛА – летательный аппарат
МГА – министерство гражданской авиации
МРЛ – метеорологический радиолокатор
ОРЛ – обзорный радиолокатор аэродромный
ПРЛ, ПРЛС – пассивный радиолокатор
РЛС – радиолокационная система
СДЦ – селекция движущихся целей
СПЦ – селекция подвижных целей
УВД – управление воздушным движением
ЭИ – электромагнитное излучение
Список литературы:
1.Мантулін В.С., Калитюк І.М. Методика виявлення радіолокаційними станціями Цивільної Авіації аномальних обєктів / Збірник наукових праць “Аномальні явища: методологія та практика досліджень”: збірник наукових праць під загальною редакцією к.т.н., доц. А.С.Білика. — К. : НТУУ “КПІ”, 2015. — 29-34 с.
Владимир Мантулин и Игорь Калытюк
Станьте нашим подписчиком и получайте новости уфологии на почту!
 Рубрика:
Рубрика:  Метки:
Метки: 



