
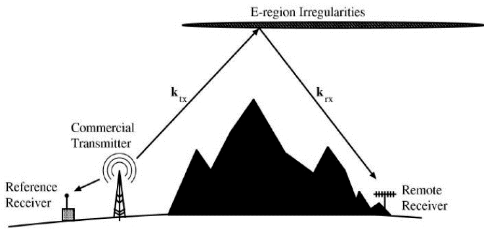
Рис.1 Загоризонтная ПРЛ (NUFORC)
Использование отражений в мультистатической пассивной радиолокации к общим рекомендациям по визуальному и инструментальному методах наблюдения
Эта система основана на использовании синхронизированных по времени радио-приемников для захвата высокочастотных радио-сигналов, что отражаются от цели. Погрешность по времени между полученными сигналами, вместе с трехмерным анализом допплеровского сдвига, позволяет вычислять местоположения цели, скорость и ускорение, курс полета и другие параметры, возможно, даже размер цели.
Анализ отраженного сигнала, объединенный с анализом характеристик цели, позволит отличать предполагаемые АО от целей известного происхождения, например самолетов, спутников, космических обломков, следов метеора, условий верхней атмосферы, погодных явлений, миграций птиц, Луны и т.д.
Одно из предложенных применений может позволить обнаруживать АО в пределах по крайней мере 27600 километров от поверхности Земли. Принцип радиолокации основан на способности некоторых материалов отражать электромагнитное излучение (ЭИ). Примерами таких объектов являются большинство металлических предметов, ионосфера Земли, ионизированные «следы» позади метеоров, плазма при определенных условиях, спутников, вошедшие в плотные слои атмосферы космические обломки, Луна, поверхность Земли, мигрирующие птицы и т.д.. Много материалов, например, воздух, лес, пластмасса, по большей части стекло и т.д., возможно, не отражают электромагнитное излучение. Отражение может зависеть от размера цели, ее материала, частоты электромагнитного излучения и т.д..
Пассивный радар (ПРЛ) это тип радарной системы, которая использует один (или больше) приемник (ов), но которая не имеет активного передатчика. Система обнаруживает радиосигналы, излучаемые соседними радиопередатчиками.
Потенциальные источники электромагнитного излучения, которые могут эксплуатироваться пассивной радарной системой, включают:
-коммерческие радио и телевизионные сигналы,
-сигналы от башен, обслуживающих сотовые телефоны,
-источники с космических платформ и другие.
Концепция пассивного радара может быть использована в нескольких вариантах. Например, в виде:
-Моностатического радара – это радарная система, в которой передатчик и приемник являются: стационарными и находящимися в том же самом положении.
-Бистатического радара – это радарная система, в которой ее элементы, либо передатчик (и) и/или приемник (и) являются: стационарными и в различных местоположениях, т.е. разнесенными.
-Мультистатического радара, который подобен бистатическому радару, но в нем применяются более двух постоянных передатчиков и/или приемников.
-Система глобального позиционирования «GPS» позволяет очень точно определять местоположение. Эта система использует синхронизированные по времени радиосигналы, переданные спутниками, которые позволяют определять не только положение, но и время. Эта система использует измерение сдвига по времени для вычисления расстояния от каждого из нескольких передающих спутников, который в свою очередь позволяет вычислять расстояния от каждого из спутников, передающих сигнал.
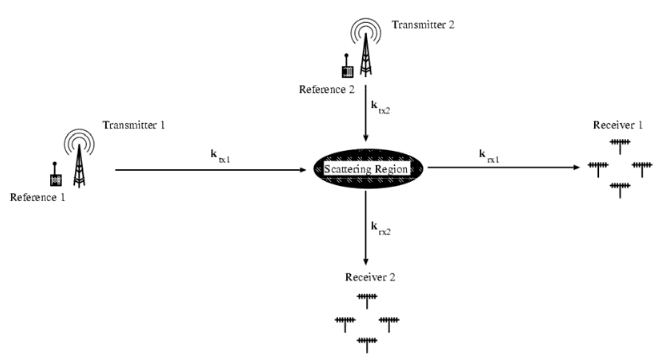
Рис.2 Мультистатический радар (NUFORC)
Использование мультистатической радиолокации:
-Загоризонтные ПРЛ – увеличение дальнего диапазона РЛС посредством отражения переданного радарного сигнала от ионосферы земли.
-Коммуникация посредством лунного реле (КРЛ) – прием радиосигналов отраженных от поверхности Луны. В данном варианте надо учитывать эффект Фарадея – когда магнитное поле Земли вызывает поворот поляризации радиоволны несколько раз, когда радиосигнал проходит через ионосферу по пути к Луне и обратно, что приводит к циклическому федингу принимаемого сигнала.
-Коммуникация по метеорным следам – использование ионизированных следов горячего газа от метеоров, входящих в атмосферу Земли, как недолгих, 1-5 секундных, пунктов отражения для передачи радиосигналов над горизонтом на отдельный приемник.
-Отражение сигналов от коммерческих МЧ радиостанций и вышек мобильной связи
-Получение сигнала РЛС с помощью сети искусственных спутников Земли (ИСЗ).
Рис.3 ПРЛ с помощью ИСЗ (NUFORC)
То, что правительственные, военные и разведывательные организации интересуется пассивными МЧ радарными системами, объясняется тем, что эта технология идеально подходит для сегодняшних требований к наблюдению и обороне из за следующих преимуществ пассивного радара:
-Он не требует активного передатчика, только многократных приемников.
-Эта система обнаруживает цели непрерывно, часто, много раз в секунду.
-Эта система не может быть обнаружена, когда она действует, так как она не имеет активного передатчика как элемента системы.
-Он может обнаруживать цели в широкой области, радиусом до сотен или тысяч километров.
-Такая система стоит относительно недорого, т.к. не требует ничего, кроме приемника, очень точного источника времени, и способности обрабатывать адекватный сигнал.
-Создание и действие системы не требуют правительственных лицензий и поэтому не контролируются правительственным агентством по лицензированию.
-Пассивной системой можно управлять фактически в любом местоположении.
Основным препятствием, с которым сталкиваются при разработке сложных пассивных радарных систем, является необходимость иметь достаточную компьютерную вычислительную мощность, чтобы быть в состоянии обработать очень большие объемы данных. Обработка сигнала в реальном времени для небольшой пассивной системы, использующей две приемных станции, обычно требует компьютерной вычислительной мощности, превышающей 10 гига операций в секунду (GOPS). Такая вычислительная мощность стала доступна только относительно недавно. Следовательно, вычислительная мощность больше не является ограничивающим фактором, это факт, который возобновил интерес к пассивным радарным системам для применения не только в крупномасштабных военных целях.
Относительно недавнее развертывание американской Системы глобального позиционирования (СГП) – это другая разработка, обеспечила вторую жизнь пассивным радарам. СГП позволяет очень точно измерять время, что необходимо для синхронизации по времени радиоприемников. Система глобального позиционирования также позволяет точно определять местоположение антенн приемника.
Конструкция системы. Конструкция пассивной, мультистатической МЧ радарной системы сравнительно проста по сравнению с активной системой. Основные элементы единой, бистатической, пассивной радарной системы включают следующие:
-Чувствительный МЧ приемник для обнаружения радиосигнала обычно в диапазоне частот 30-230 МГц, в зависимости от типа цели, которую необходимо обнаружить.
-Современный, быстродействующий компьютер с достаточной мощностью для записи большого числа точек перехвата в секунду и способный очень быстро обрабатывать сигнал.
-Соответствующее программное обеспечение для быстрой обработки сигнала, чтобы обеспечить вычисление трехмерной информации допплеровского смещения.
-Доступ к оборудованию СГП для измерения точного времени и положения.
-Знание или доступ к оригинальному переданному радио-сигналу.
Действие системы осуществляется в трех фазах
-Фаза перехвата:
1)Составные антенны приемника развернуты таким образом, что они ограждены от прямой коммуникации луча обзора с МЧ передатчиком, но в состоянии обнаруживать любые сигналы, отраженные от района нахождения цели.
2)Антенны системы присоединены к радио-приемнику, который настроен на эталонную частоту передатчика.
3)Применяется такое оборудование для точного измерения времени (обычно от СГП), что время поступления отраженного сигнала в каждой приемной антенне может быть измерено очень точно.
4)Измерена и зарегистрирована точная частота каждого из отраженных сигналов, полученных каждой из приемных антенн.
-Фаза обработки сигнала.
Как только зарегистрирован перехват отраженного сигнала, процесс, который может протекать сотни или тысячи раз в секунду, этот перехваченный сигнал может быть проанализирован множеством способов, позволяющих извлечь информацию из сигнала.
5)Сдвиг по времени, когда отраженный сигнал перехвачен каждой соответствующей сложной антенной, используется, чтобы провести триангуляцию местоположения отраженного сигнала.
6)Многократные вычисления местоположения цели используются, чтобы вычислить скорость, ускорение и курс полета цели.
7)Любое очень тонкое изменение в частоте (допплеровский сдвиг) отраженного сигнала, вызванное движением цели относительно местоположения неподвижной антенны, может быть сравнено с частотой эталонного переданного сигнала для того, чтобы вычислить скорость цели.
-Фаза дискриминации цели.
Полученные данные могут использоваться для анализа источника или причины отраженного сигнала. Вероятно, самой полезной элементной информацией для определения природы цели являются ее местоположение, угол места, протяженность, скорость, ускорение и курс полета.
Анализ любого из этих параметров может быть достаточен, чтобы исключить вероятность одной или более категорий целей. Например, мигрирующие птицы не ожидаются выше определенной высоты или скорости. Точно так же большинство самолетов наблюдались бы ниже определенной высоты и не как стационарные объекты. Метеор не будет стационарным объектом. В ходе подобных рассуждений другие категории целей также могут быть исключены.
Описанные системы обнаружения могут быть использованы по следующим сценариям:
Сценарий 1: Использование коммерческого МЧ радио и телевизионных сигналов
Большое количество мощных коммерческих радиостанций в США предлагают с готовностью доступный источник МЧ сигнала в радиопередачах (88-108 МГц для радио) для использования типичной мультистатической радарной системой. Предпосылки для действия пассивной радарной системы следующие: 1) процессор сигнала имеет доступ к сигналу радиопередачи, который служит эталоном и 2) передатчик не «видим» приемниками, то есть он находится выше горизонта от приемников или так или иначе «огражден» от них. С приемником, настроенным на операционную частоту любой радиостанции, перехваты системой могут быть отнесены к соседнему пункту отражения либо в атмосфере, либо на поверхности. Сравнение полученного сигнала с оригинальным сигналом радиопередачи предоставит информацию о природе цели. Имея достаточную способность для анализа сигнала, система в состоянии вычислить местоположение цели, ее скорость, ускорение и курс полета и, возможно, оценить ее размер. Эта информация должна быть адекватной для того, чтобы отличать различные типы целей.
Сценарий 2: Использование передатчика Системы наблюдения ВМФ США
Природа передач фазовой сложной антенны, используемой Системой наблюдения ВМФ США для обнаружения и отслеживания орбитальных объектов, делает ее идеальной для любительского от-слеживания целей в околоземной окружающей среде или вне ее. Передатчики системы передают очень мощный (768 кВт), высокочастотный непрерывный волновой сигнал (216,98 МГц), который должен допускать легкое обнаружение и высокую разрешающую способность объектов близ трех передатчиков системы. Учитывая, что система была разработана, чтобы обнаруживать цели приблизительно 10 сантиметров в диаметре на расстоянии до 27600 километров, обнаружение цели, диаметр которой составляет порядка десяти метров, для такого диапазона был бы тривиальным процессом.
Сценарий 3: Адаптация пассивной системы Вашингтонского университета
Персонал в Вашингтонском университете, г. Сиэтл, разработал рабочую бистатическую радарную систему, которая спонсируется Национальным фондом науки, для отображения в метровом масштабе e-области атмосферы Земли. Система может быть дублирована и приспособлена к тому, чтобы отслеживать объекты в околоземной окружающей среде. Система, вероятно, должна быть преобразована в мультистатическую систему с многократными антеннами, чтобы позволять получать трехмерное отображение, кроме того, мощность обрабатывающего сигнала, возможно, придется значительно расширить, чтобы позволить обрабатывать в режиме реального времени быстрые перемещения целей. Достаточные ресурсы и технический персонал делают такой проект, по-видимому, выполнимым.
Список сокращений терминов:
АО – аномальный объект
ИСЗ – искусственный спутник Земли
КРЛ – координаты радиолокации
МЧ – частотная модуляция, см. ЧМ
ПРЛ, ПРЛС – пассивный радиолокатор
РЛС – радиолокационная система
СГП – система глобального позиционирования, см. GPS
ЭИ – электромагнитное излучение
Список литературы:
1.Davenport P.B. Use multistatic passive radar for real-time detection of a UFO’s in the near-Earth environment / National UFO Reporting Center – Seattle: NICAP, 2004
Игорь Калытюк
Станьте нашим подписчиком и получайте новости уфологии на почту!
 Рубрика:
Рубрика:  Метки:
Метки: 



