
АНАЛІЗ ДАНИХ ВІДЕО СПОСТЕРЕЖЕННЯ ІМОВІРНОГО ААЯ У ЗОНІ ВІЙСЬКОВИХ ДІЙ У 2024 РОКУ
1.Вихідні дані.
Первинне джерело даних: відео отримане від в/ч А**** в ході комунікації із іншого випадку за зверненням від в/ч А****, і вказано як відео, відзняте противником і викладене на одному із його телеграм-каналів. Точна адресність наразі в процесі дослідження. Дата спостереження первинно невідома, імовірно лютий-березень 2024 року. Із вигляду запису видно, що він зроблений дроном Mavic 3T. Якість відео дозволяє висунути гіпотезу про те, що воно є перетисненим із оригіналу при завантаженні у телеграм-канал.
2.Оцінка справжності відео.
Відсутність оригіналу відео на час проведення дослідження не дозволяє встановити справжність відео. Враховуючи вказання авторства відео за противником, причинами підроблення відео можуть бути намагання перебільшити ЛТХ наявних у нього апаратів, проте на відео не міститься ніяких ознак, які могли б віднести спостережене явище до ЛА/БпЛА рф. Разом із тим, це вже третє відео ААЯ, станом на 15.06.2024, яке зняте на Mavic 3T у зоні бойових дій, що опосередковано експертно свідчить про його автентичність.
3.Характерний опис відео.
Відео має тривалість 22 секунди. Характерні кадри відео показані на рис. 1-17.
Явище на відео являє собою побудову із 5 кулястих неопізнаних об’єктів, у формі клина, із центральним об’єктом та двома «крилами» по два об’єкти кожен.

Рис. 1. Поява об’єктів. Час 4:17

Рис. 2. Рух об’єктів. Час 5:14

Рис. 3. Рух об’єктів. Час 6:13. Змазаність пояснюється артефактами пікселізації при перетисненні відео із швидким рухом.

Рис. 4. Рух об’єктів. Зміна кута огляду дрона. Час 7:17.

Рис. 5. Рух об’єктів. Поворот камери дрона. Час 7:17.

Рис. 6. Рух об’єктів. Час 8:19.

Рис. 7. Рух об’єктів. Час 9:05.

Рис. 8. Рух об’єктів. Поворот камери дрона. Час 9:19.

Рис. 9. Рух об’єктів. Час 9:21.

Рис. 10. Рух об’єктів. Час 10:00.

Рис. 11. Рух об’єктів. Час 10:07.

Рис. 12. Рух об’єктів. Поворот камери дрона. Час 10:19. Видно незначну зміну клина через варіацію дистанцій між окремими об’єктами

Рис. 13. Рух об’єктів. Час 11:07.

Рис. 14. Рух об’єктів. Поворот камери дрона. Час 12:12.

Рис. 15. Зникнення об’єктів у тепловому фоні місцевості. Поворот камери і рух дрона. Час 17:05.

Рис. 16. Об’єкти ледве простежуються. Поворот камери і рух дрона. Час 20:02.

Рис. 17. Кінцеве зникнення об’єктів на фоні. Поворот камери і рух дрона. Час 22:12.
Напрямок руху об’єктів, який встановлено по бортовому компасу – з південного сходу на північний захід.
4.Характеристики зйомки.
Зйомка з огляду на інтерфейс, проведена із дрона DJI Mavic 3T із термографічною камерою. Характеристики наведені нижче, табл.1.
Табл.1. Характеристики DJI Mavic 3T
|
Датчик |
Неохолоджуваний Vox-мікроболометр |
|
Крок пікселя |
12 μm |
|
Частота кадрів |
30 Hz |
|
Об’єктив |
Діагональне поле зору: 61°, Еквівалентна фокусна
відстань: 40 mm, Кришка: f/1,0, Фокус: 5 m bis ∞ |
|
Чутливість |
≤50 mk bei f/1,1 |
| Температурний метод | Точкове вимірювання, вимірювання площі |
|
Діапазон вимірювання температури |
Режим високого посилення: -20 °C bis 150 °C
Режим низького посилення: 0 °C bis 500 °C |
|
Палітра |
Біле гаряче/ Чорне гаряче/ Відтінок/ Червоне залізо / Гаряче залізо/ Арктика/ Лікарський/ Фульгурит/ Веселка 1/ Веселка 2 |
|
Формат фото |
JPEG (8 Bit), R-JPEG (16 Bit) |
|
Роздільна здатність відео |
640×512 bei 30 fps |
|
Бітрейт |
6 MBit/s |
|
Формат відео |
MP4 (MPEG-4 AVC/H.264) |
|
Фоторежими |
Одиночний: 640×512, Інтервал: 640×512 JPEG: 2/3/5/7/10/15/20/30/60 s |
|
Цифровий зум |
28x |
| Інфрачервона довжина хвилі |
8 до 14 μm |
| Точність інфрачервоного
вимірювання температури |
±2 °C або ±2 % (при використанні більшого значення) |
Основні особливості спостереження можна виділити наступні:
- Зйомка проведена у інфрачервоному діапазоні.
- Об’єкти на оригінальному відео являють собою групу 5 тіл, кулястої форми
- Швидкість руху висока, рівномірна.
- Об’єкти пролітають нижче дрона.
- Побудова з однаковим інтервалом у вигляді симетричного прямого клина.
- Дистанція між об’єктами вцілому дотримується, але в одному із моментів відео (див. вище) видно незначну зміну клина через варіацію дистанцій між окремими об’єктами.
За температурною шкалою, об’єкти мають порівняно невисоку температуру. Білий колір на відео за шкалою може відповідати температурі біля 3 гр.Ц.
5.Оцінка розмірів та параметрів об’єкта.
Геометричні параметри. Визначення геометричних параметрів можливе за допомогою просторового моделювання.
H= 225 м виходячи із бортових показів БпЛА (за даними екрану інтерфейсу).
Очевидним мінусом тепловізійної зйомки є відсутність знання про істинне забарвлення об’єктів у видимому спектрі та їх неспотворену форму.
Для просторового моделювання спостереження, враховуючи мету розрахунків, прийняті наступні виправдані гіпотези:
- Об’єкти летіли побудовою горизонтально.
- Тангенси малих кутів рівні самим кутам.
- Враховуючи що немає орієнтирів, але невідомі об’єкти пролітають у близькості поруч із дроном-спостерігачем, приймемо виправдане припущення, що DG= H=GO, a = 450 (рис. 18).
Висота прольоту об’єктів невідома, але виходячи із фокусної відстані відео , вона не приземна. Тому експертно розглянемо три рівні висоти: 100, 150 та 200 м.
Тоді можна записати:
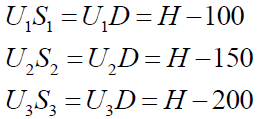
Виходячи із схеми можна вивести наступні залежності:

Діагональний кут зору термокамери 61°. Тоді сторона куту зору термокамери (вертикальний кут огляду термокамери) із дрона рівна 43,1°.
За характеристичним кадром максимального наближення об’єктів кутовий розмір групи складає: 5,03*43,1/111,6 = 1,94° (розміри виміряні по зображенню).
Прийнявши, що горизонтальна проекція діаметрального розміру в площині руху об’єктів не надто відрізняється від основи рівнобедреного трикутника з вершиною у БпЛА та кутом при вершині рівним кутовому розміру групи об’єктів, то тоді варіанти діаметрального розміру об’єкта рівні:

Відповідно дані параметри будуть рівні d1=5,99 м, d2= 3,59 м, d3= 1,2 м.
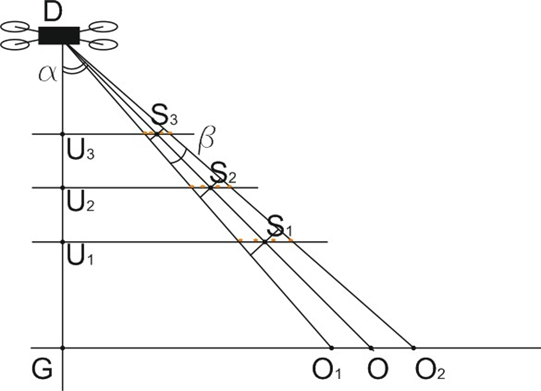
Рис. 18. Схема просторового моделювання спостереження Кут клина орієнтовно складає за вимірами 40 гр.
Обчислення швидкості об’єкта. За геометричними обчисленнями по зображенню, об’єкт проходив біля 5,25 власних розмірів на час 9,05-8,19 = 0,86 с. Отже кутова швидкість наближено складає 5,25 * 1,94/0,86 = 11,84 гр/с.
Лінійна швидкість тоді складатиме v = d*5.25/0.86. Результати складатимуть: v1 = 36,54 м/с, v2 = 21,93 м/с, v3 = 7,31 м/с.
Гранична яскравість об’єктів невизначена, так як зйомка велася лише у тепловому діапазоні. Час зависання приймемо рівним нулю, так як об’єкти демонструють рівномірний рух. Швидкість і радіус розвороту не існують для спостереженого явища, так як в межах відео об’єкти не здійснювали розворотів.
Кількість надлишкових параметрів, не врахованих у моделі – прийнято 1, так як групове розташування об’єктів, які суттєво впливають на ідентифікацію – не враховане поки у системі ототожнення.
Таким чином, формуємо кортеж із трьох планів ототожнення. Для групи об’єктів вцілому він буде наступним (табл.2).
Табл.2.
|
Гранична яскравість, кд/м.кв. |
невизн. | невизн. | невизн. |
|
Максимальний час зависання, с |
0 | 0 | 0 |
|
Діаметральний розмір, м |
5,99 | 3,59 | 1,20 |
| Швидкість, м/с | 36,54 | 21,93 |
7,31 |
|
Висота, м |
100 | 150 | 200 |
| Мінімальний радіус розвороту, м | Не існує | Не існує |
Не існує |
|
Кутова швидкість розвороту, гр/с |
Не існує | Не існує |
Не існує |
| Кутовий розмір, гр | 1,94 | 1,94 |
1,94 |
| Кутова швидкість, гр/с | 11,84 | 11,84 |
11,84 |
|
Кількість надлишкових параметрів, не врахованих у моделі |
1 |
1 |
1 |
Коефіцієнт надійності інформації був прийнятий 0,95 (інформація отримана на основі оригінального відео). Відомою французькою дослідницькою групою GEIPAN розроблена система класифікації повідомлень щодо ААЯ за їх рівнем незвичайності (étrangeté) та інформаційної наповненості (consistance) із поділом на п’ять категорій ототожнення: А: зареєстрований феномен є абсолютно ототожненим, як явище природного або антропогенного походження. У результаті досліджень встановлені однозначні докази щодо походження явища. В: зареєстрований феномен в цілому є ототожненим, як явище природного або антропогенного походження. Проте через недостатність кількісних або/та якісних даних; встановлених у результаті дослідження доказів щодо походження явища не має. С: зареєстрований феномен не може бути ототожнений через недостатність кількісних або/та якісних даних. D1: зареєстрований феномен є не ототожненим, але рівень незвичайності і інформаційної наповненості повідомлення – середній. D2: зареєстрований феномен є не ототожненим, рівень незвичайності і інформаційної наповненості повідомлення – високий. Дані категорії введені у систему UESP.
6.Результати розрахунку.
Автоматизований обрахунок показав, що результати за всіма трьома планами збігаються. За всіма розглянутими у системі ототожнення явищами-гіпотезами, спостережене НЛО отримало категорію D1 (зареєстрований феномен є не ототожненим, але рівень незвичайності і інформаційної наповненості повідомлення – середній), рис.19 (Білик А.С. Розробка і прикладне застосування математичної моделі ототожнення ААЯ з урахуванням невизначеності, пов’язаної із відсутністю та із надлишком інформації Аномальні явища: методологія і практика досліджень: зб. наук. праць / під заг. ред. А.С. Білика. – К.: Знання, 2020.– C.55-68).
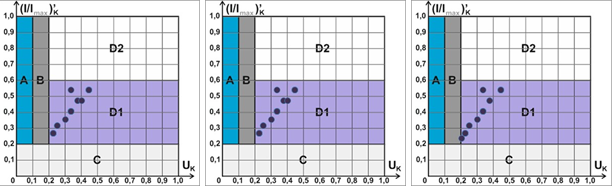
План 1 План 2 План 3
Рис. 19. Графічне представлення результатів ототожнення для групи об’єктів (нормовані міра кількості інформації і неототожненість явища у повідомленні про НЛО за результатами автоматизованого ототожнення)
Серед явищ-гіпотез, що набрали узгальнено найбільші значення ототожненості, слід виділити наступні (табл.3).
Табл.3.
|
Індекс гіпотез |
Гіпотеза | Pmax |
| P1.3.1.3, P1.3.2.3, P1.3.3.3,
P1.3.4.3, P1.3.5.3, P1.3.6.2, P1.3.6.3, P1.3.8.2, P1.3.8.3, P1.3.9.1.3 |
Літаки, винищувачі, гелікоптери |
0,75 |
|
P1.4.8 |
Квадрокоптери,авіамоделі, БПЛА | 0,75 |
| P1.4.7 | Китайські ліхтарики |
0,78 |
Враховуючи, що на відео чітко простежується місцевість у проміжками між об’єктами, можна з великою долею вірогідності стверджувати, що спостерігалася саме група об’єктів, а не один великий об’єкт.
Також, в одному із моментів відео (див. вище) видно незначну зміну клина через варіацію дистанцій між окремими об’єктами., що свідчить про те що об’єкти являють радше групу окремих тіл, а не одне тіло з об’єктами.
Відтоді можемо додатково розглянути кожен об’єкт із групи при ототожненні окремо.
Виміряний кутовий розмір одного об’єкта тоді становитиме: 0,41 градус. Діаметральний розмір одного об’єкта тоді становитиме: d1 =1,26 м, d2 =0,76 м, d3 =
0,25 м.
Тоді кортеж із трьох планів ототожнення для об’єктів, як поодиноких буде
наступний (табл.4).
Табл.4.
|
Гранична яскравість, кд/м.кв. |
невизн. | невизн. | невизн. |
| Максимальний час зависання, с |
0 |
0 |
0 |
|
Діаметральний розмір, м |
1,26 | 0,76 | 0,25 |
| Швидкість, м/с | 36,54 | 21,93 |
7,31 |
|
Висота, м |
100,00 | 150,00 | 200,00 |
| Мінімальний радіус розвороту, м | Не існує | Не існує |
Не існує |
|
Кутова швидкість розвороту, гр/с |
Не існує | Не існує | Не існує |
| Кутовий розмір, гр | 0,409389 | 0,409389 |
0,409389 |
|
Кутова швидкість, гр/с |
11,84 | 11,84 | 11,84 |
| Кількість надлишкових параметрів, не врахованих у моделі |
1 |
1 |
1 |
Проведене автоматизоване ототожнення показало, що результати за всіма трьома планами збігаються (рис. 20).
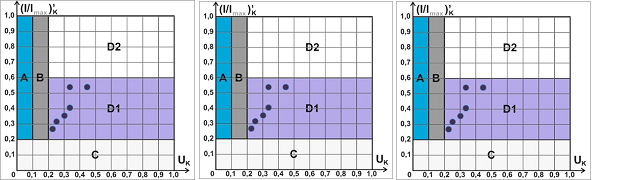
План 1 План 2 План 3
Рис. 20. Графічне представлення результатів ототожнення для поодинокого об’єкту (нормовані міра кількості інформації і неототожненість явища у повідомленні про НЛО за результатами автоматизованого ототожнення)
Гіпотези для поодинокого об’єкту та групи об’єктів за значеннями максимальної ототожненості (застосовності гіпотез) збігаються із наведеними у табл.3.
Слід зауважити, що програма UESP 3.5 поки не враховує новітні ефекти від військових дій (особливі дрони, ракети, вибухи тощо).
Тому нижче розглянемо як тривіальні, так і новітні ефекти від військових дій, і нетривіальних гіпотез щодо можливого походження НЛО, які поки що не внесено у автоматизовану систему ототожнення.
7.Розгляд імовірних і нетривіальних гіпотез походження явища.
Фактори аномальності (ФА) – прояви феномену, характеристики яких не належать масиву проявів явищ-гіпотез відомої природи. Фактори аномальності формують картину феномена шляхом доповнення бази знань про нього. Кажучи математично, ФА можуть бути як проявами із підмножини кожної конкретної групи (класу ототожнення) досліджуваного явища, що знаходиться поза межами сукупної області визначення всіх гіпотез у цій підмножини (наприклад швидкість набагато більша за граничну для найшвидшого відомого літака), так і взагалі проявами поза класами ототожнення (наприклад світлові промені скінченної довжини, раптове зникнення або поява, раптова зміна розмірів, форми об’єкту тощо).
Основними ФА розглядуваного НЛО, наскільки можна їх виділити на основі наявних відеоматеріалів є наступні:
- Строга клиноподібна побудова об’єктів
- Близькість об’єктів один до одного
- Куляста стала форма об’єктів
- Висока швидкість та зкоординованість
Явища-гіпотези, які потребують розгляду:
1)Літаки, винищувачі, гелікоптери
Форма об’єкта та його розміри за різними планами навіть при розгляді, як групи — не відповідають існуючим даним щодо відомих ЛА. Також немає видимих слідів движителя чи взагалі будь-яких ознак того, що об’єкти щось випромінюють назовні, окрім тепла, що видно у тепловізор дрона, який веде зйомку (рис. 21).
2)Квадрокоптери, авіамоделі, БПЛА (в т.ч. дрони з т.зв. «ройовим керуванням»)
Дана гіпотеза є однією з найбільш цікавих, так як допускає рівномірну побудову об’єктів та її дотримання в процесі польоту, в тому числі на малій відстані. Проте доволі близький політ об’єктів до дрона що веде зйомку відео, виявляються неузгоджені із даною гіпотезою параметри, а саме: невідповідність відомим БпЛА форми об’єктів, та відсутність видимих обертових частин (для гвинтового варіанту); відсутність теплового
протяжного сліду за об’єктами (що би мало бути при використанні реактивних двигунів), рис. 21.
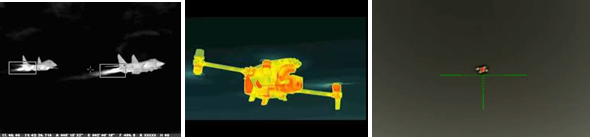
Рис. 21. Термографічні фото окремих розглядуваних явищ-гіпотез: а – літаки, б, в – дрони, джерело — Інтернет
3)Китайські ліхтарики
Дана гіпотеза цікава тим, що куляста форма без зовнішніх видимих проявів движителя, може справді відповідати китайським ліхтарикам.
Проте, інші параметри спостереження не відповідають даній гіпотезі: висока швидкість руху, впорядкованість і синхронність руху об’єктів, також температура об’єктів на відеоо занизька впорівняно із китайськими ліхтариками, у яких повітроплавання забезпечується внутрішнім джерелом вогню (рис. 22).
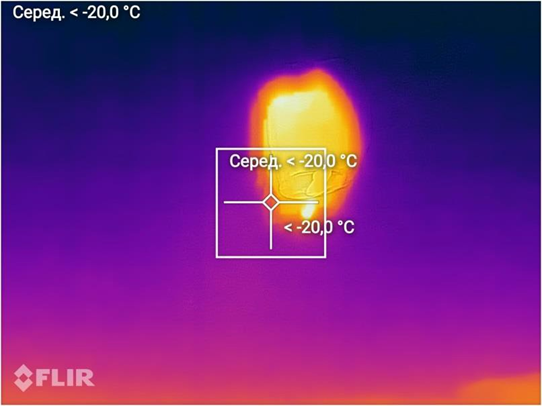
Рис. 22. Термографічне фото китайських ліхтариків, джерело: УНДЦА «Зонд»
4)Ракети. Дана гіпотеза не може пояснити «неракетну» форму об’єктів, їх побудову в просторі та горизонтальний рух. Зйомка у тепловізор ракет зблизька – дає змогу побачити як факел ракетного двигуна, так і сам корпус ракети (рис. 23).
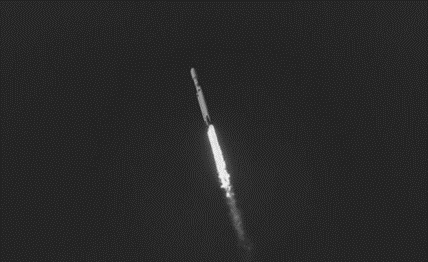
Рис. 23. Термографічне представлення руху ракети (джерело: FLIR thermal imaging)
З метою більш детального аналізу гіпотези ракет розглянемо характеристичне відео із запуском ракет із морського дрона зі зйомкою за допомогою дрона із тепловізором (рис. 24).

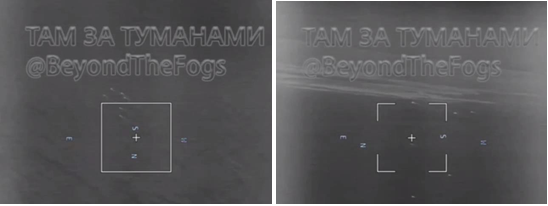
Рис. 24. Приклад характеристичного відео із запуском ракет із морського дрона зі зйомкою за допомогою дрона із тепловізором
Як видно із відео, за об’єктами ракет навіть із великої відстані простежується факел та інверсійний слід. Також, у ракет чітко простежується балістична траєкторія, яка відсутня на відео із неототожненими об’єктами.
Окрім вищенаведеного, обчислена швидкість об’єктів замала для ракет відомих типів.
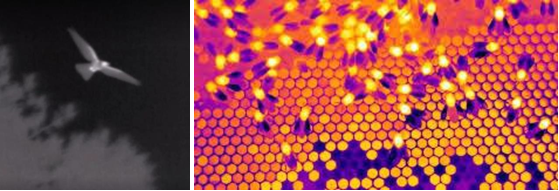
Рис. 25. Термографічні фото окремих розглядуваних явищ-гіпотез: а – птахи, б – бджоли на стільниках, джерело — Інтернет
5)Птахи, кажани. Незмінна форма, відсутність видимих помахів крил і велика швидкість (співмірна тільки зі швидкістю сапсана або подібних) дозволяє вцілому відкинути цю гіпотезу (рис. 25).
6)Комахи. Відсутність видимих помахів крил, завеликі розміри дозволяють вцілому відкинути цю гіпотезу (рис. 25).
7)Снаряди, кулі. З відео видно, що об’єкти летять протягом всієї зафіксованої ділянки – рівномірно. Снаряди і кулі мають летіти по балістичній траєкторії, особливо на довгих нисхідних ділянках, в той же час видно прямолінійну траєкторію на занадто довгій ділянці, та відсутність балістичної параболи; швидкість об’єктів замала для снарядів і куль. Кучність об’єктів та відстані між ними, побудова – також аномальна для пласкої рівної ланки в польоті. Форма об’єктів непояснена для снарядів і куль.
8.Висновки
Отже в результаті аналізу встановлено наступне.
- Проаналізоване відео отримане від в/ч А**** в ході комунікації із іншого випадку за зверненням від в/ч А****, і вказано як відео, відзняте противником і викладене на одному із його телеграм-каналів. Точна адресність наразі в процесі дослідження, проте з огляду на те, що це вже третє відео ААЯ, станом на 15.06.2024, яке зняте на Mavic 3T у зоні бойових дій, що опосередковано експертно свідчить про його автентичність.
- Відео має тривалість 22 секунди. Явище на відео являє собою побудову із 5 кулястих неопізнаних об’єктів, у формі клина, із центральним об’єктом та двома «крилами» по два об’єкти кожен. Напрямок руху об’єктів, який встановлено по бортовому компасу дрона – з південного сходу на північний захід.
- Основні особливості спостереження можна виділити наступні:
- Зйомка проведена у інфрачервоному діапазоні.
- Об’єкти на оригінальному відео являють собою групу 5 тіл, кулястої форми
- Швидкість руху висока, рівномірна.
- Об’єкти пролітають нижче дрона.
- Побудова з однаковим інтервалом у вигляді симетричного прямого клина.
- Дистанція між об’єктами вцілому дотримується, але в одному із моментів відео (див. вище) видно незначну зміну клина через варіацію дистанцій між окремими об’єктами.
Об’єкти мали порівняно невисоку температуру, на відео за шкалою тепловізора відповідає температурі біля 3 гр.Ц.
- Основними факторами аномальності розглядуваного НЛО, наскільки можна їх виділити на основі наявних відеоматеріалів є наступні:
- Строга клиноподібна побудова об’єктів
- Близькість об’єктів один до одного
- Куляста стала форма об’єктів
- Висока швидкість та зкоординованість
- За результатами проведеного просторового моделювання, було визначено розміри, швидкість та інші параметри об’єкта, на основі експертно прийнятої гіпотези щодо трьох варіантів висоти розташування об’єкта: 100, 150 та 200 м.
- Автоматизований обрахунок ототожненості у автоматизованій системі ототожнення UESP 3.5 (розробка УНДЦА «Зонд») – показав, що за всіма розглянутими у системі ототожнення явищами-гіпотезами, спостережене НЛО отримало категорію D1 (зареєстрований феномен є не ототожненим, але рівень незвичайності і інформаційної наповненості повідомлення – середній).
- Окремо було розглянуто гіпотези для поодинокого об’єкту та групи об’єктів за значеннями максимальної ототожненості (застосовності гіпотез), було виявлено, що результати розрахунків за ними збігаються.
- Окремо було проаналізовано як явища-гіпотези, визначені у автоматизованій системі ототожнення UESP 3.5 (літаки, винищувачі, гелікоптери, авіамоделі, БПЛА та китайські ліхтарики), специфічні явища (птахи, кажани, комахи), так і новітні явища- гіпотези, пов’язані із військовою активністю: ракети, снаряди, кулі.
- Високий рівень організації та координації об’єктів при русі дозволяв би припустити, що спостережені на відео об’єкти — це дрони із т.зв. «ройовим керуванням»), проте доволі близький політ об’єктів до дрона що веде зйомку відео, виявляються неузгоджені із даною гіпотезою параметри, а саме: невідповідність відомим БпЛА форми об’єктів, та відсутність видимих обертових частин (для гвинтового варіанту); відсутність теплового протяжного сліду за об’єктами (що би мало бути при використанні реактивних двигунів).
- Гіпотеза щодо снарядів і куль також не задовольняє спостережені характеристики об’єктів із відео, так як снаряди і кулі мають летіти по балістичній траєкторії, особливо на довгих нисхідних ділянках. В той же час на відео видно прямолінійну траєкторію на занадто довгій ділянці, та відсутність балістичної параболи; швидкість об’єктів замала для снарядів і куль. Кучність об’єктів та відстані між ними, побудова — також аномальна для пласкої рівної ланки в польоті. Форма об’єктів непояснена для снарядів і куль.
- Рекомендовано провести пошук оригінала відео, та інших його очевидців (із української сторони). Цікавими для аналізу були б також дані інших відеозйомок, засобів РЕР, якщо вони доступні.
- В кінцевому висновку, попередньо спостережене явище має високий ступінь аномальності за візуальними і обчисленими ознаками (категорія D1). V-подібна побудова поодиноких кулястих об’єктів має широкі аналоги в історії спостережень. Військові спостереження стають все більш частішими, що закономірно відносно концентрації засобів спостереження і моніторингу за повітряно-космічним простором.
- Спостереження НЛО і їх аналіз становлять безпосередній інтерес для національної безпеки України, так як НЛО можуть виявлятися ворожими БпЛА/ЛА; ААЯ можуть впливати на ОВТ та ОС; частина втрат БпЛА силами оборони через невстановлені причини — можуть пояснюватися через дію ААЯ; невідомі уламки та матеріальні свідоцтва можуть виявлятися від нових типів БпЛА і навпаки тощо.
- Слід відмітити, що порядок значень діаметрального розміру об’єктів у даному спостереженні – вцілому зіставний із діаметральним розміром об’єктів попереднього спостереження від 28 березня 2024 року (див. окремий звіт УНДЦА «Зонд»). Основні нетривіальні гіпотези, які розглядаються: 1) невідомі зразки техніки третьої сторони
2) невідомі форми життя або явища високої організації матерії. Окремо був проведений аналіз причин для групової побудови об’єктів в польоті. За результатами аналізу можна виділити наступні причини:
- Ройова взаємна координація, організованість, енергообмін абощо
- Спільна економна аеродинаміка (прискорення у супутньому потоці), для деяких побудов
- Візуальне злиття, менша ймовірність та віддаль виявлення в оптичному та інших діапазонах
- Мімікрія під групи інших об’єктів (наприклад птахів)
- Видимо розрізнені об’єкти насправді являють одне ціле тіло
- Менша видимість на радарах
- Здатність проявлятися або / та діяти лише у визначеній обмеженій у просторі області (але це не пояснює структурованість груп)
- Інші причини, за межами доступного нам аналізу.
А.С.Білик, к.т.н., доц., Голова УНДЦА «Зонд»
Читайте також:
1.Предварительный анализ данных — наблюдение военными ВСУ вероятного НАЯ 28 марта 2024
2.Предварительный анализ данных — наблюдение военными ВСУ вероятного НАЯ 24 февраля 2024
Станьте нашим подписчиком и получайте новости уфологии на почту!
 Рубрика:
Рубрика:  Метки:
Метки: 



